1. 现场环境及焊接设备基本情况
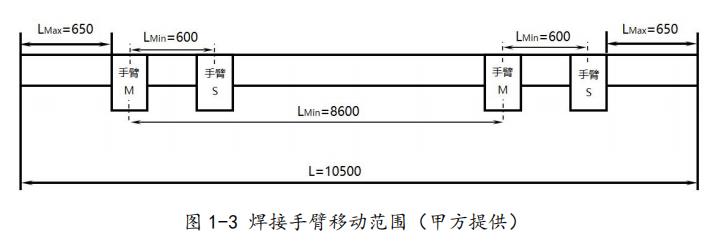
IGM 自动焊机为双工位龙门式结构,龙门横向跨度 11 米(图 1-1),焊接
手臂 2 个(图 1-2),焊接手臂移动范围如图(图 1-3)。
焊接手臂最前端总负载能力 15kg,其中已集成的焊枪及焊缝跟踪重量约 3kg,焊接设备焊接速度范围 0.4m/min-1.4m/min。焊枪焊接倾角范围±5°,焊枪存在两枪同步焊接和一枪焊接一枪不焊接两种工作模式。
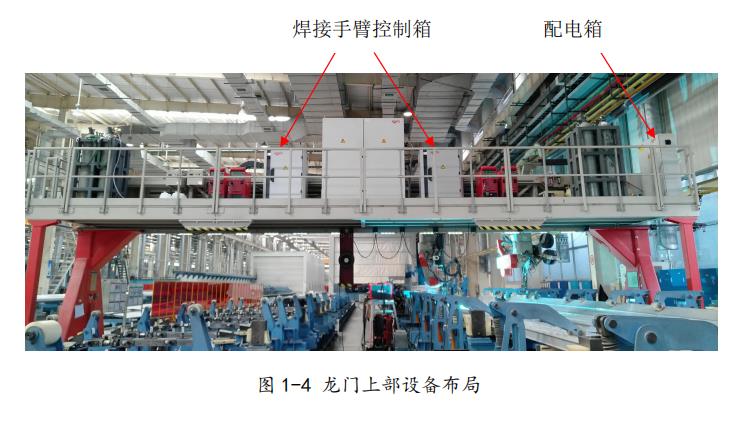
配电箱、焊接手臂控制箱、空压机等都位于龙门上部横梁上,其中,配电箱可提供多组交流 220V 电源接口,焊接手臂控制箱可提供多组 I/O 接口,空压机可以提供气源,空压机额定排气压力为 0.8MPa,最大允许工作压力 0.86MPa。
客户其他需求:
1.激光清洗主机重量 80kg,不能集成于焊接机械臂上,可集成于龙门上;
2.激光清洗设备外观需与整个 IGM 焊接设备外观一致,保持整个设备外观协调统一;
3.焊接设备上无吸尘设备,无集成吸尘设备的需求
2. 设备集成结构分析
激光清洗头集成位置选择,根据清洗原理以及焊接手臂结构,可利用焊接头部安装孔安装激光清洗头(图 1-5)。
激光清洗主机集成位置选择,结合焊接手臂移动范围、清洗机重量 80kg,以及焊接手臂载重情况要求,可将激光清洗机主机安装于灯带处龙门横梁上(图1-6、图 1-7)。
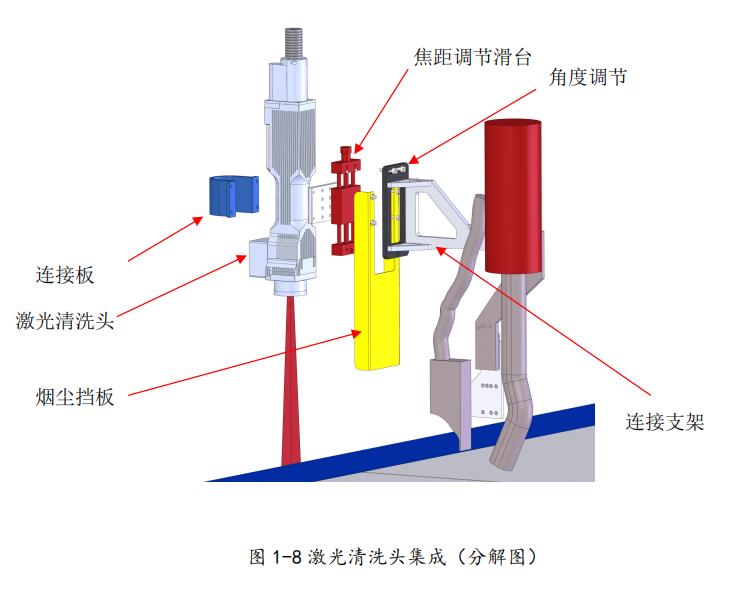
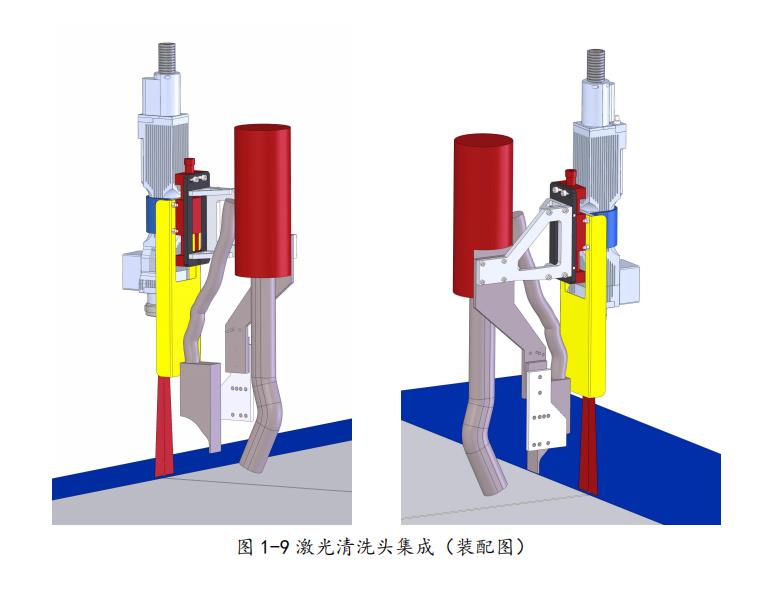
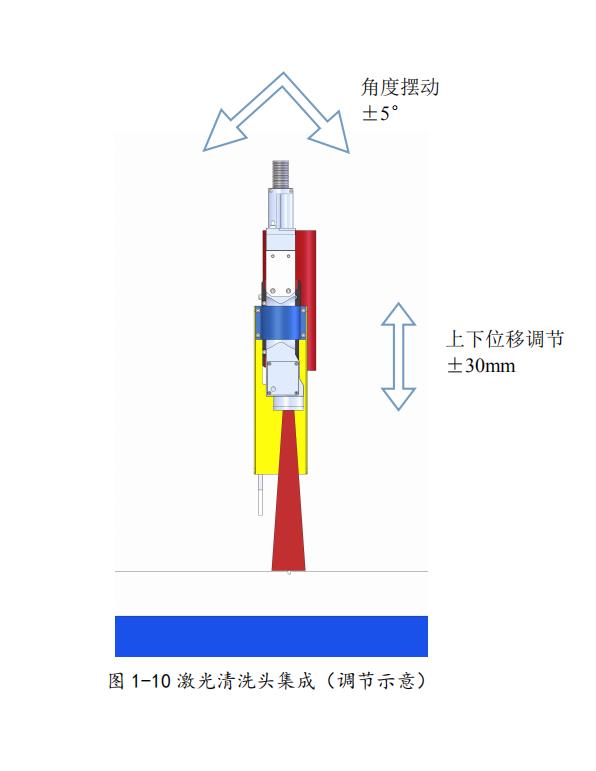
3. 激光清洗头集成安装
根据现场焊枪头部尺寸以及焊接时焊接速度范围 0.4m/min-1.4m/min,优先选用 F254 型号场镜。激光清洗头采用连接件与焊枪头部连接,并使清洗头在竖直方向有一定的调节范围±30mm,用来缓解实际焊接时焊枪存在的前倾后仰引
起的焦距误差。为防止清洗头安装时激光清洗线在焊缝左右方向的歪斜,保证焊缝清洗宽度的一致性,特增加清洗头摆动机构,使清洗头可在±5°范围内摆动。
由于现场无吸尘设备,而焊接设备焊接时产生大量烟尘,使存在严重污染清洗头镜头的情况,设计中考虑将清洗头前端增加气刀结构或在清洗头前端增加正压装置(实验阶段),避免清洗头镜头被污染,并加挡板辅助阻挡焊接烟尘扩散
至清洗头处。
设计完成后的清洗头及支架总质量约 5kg,满足焊接手臂最前端总负载能力要求。
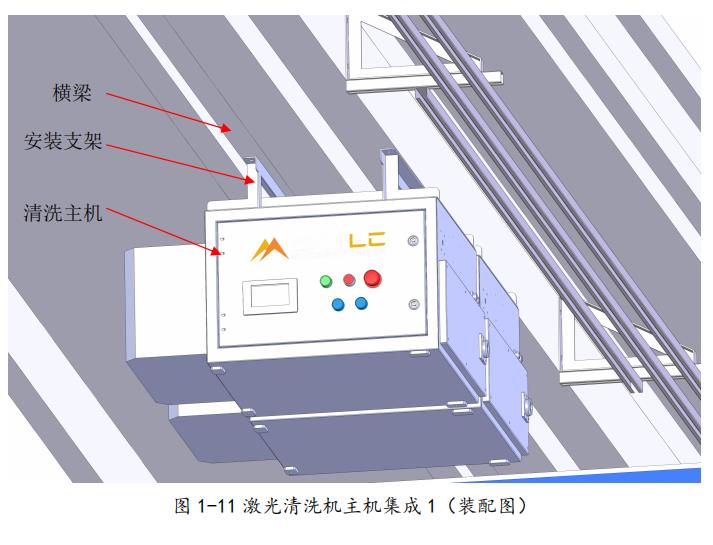
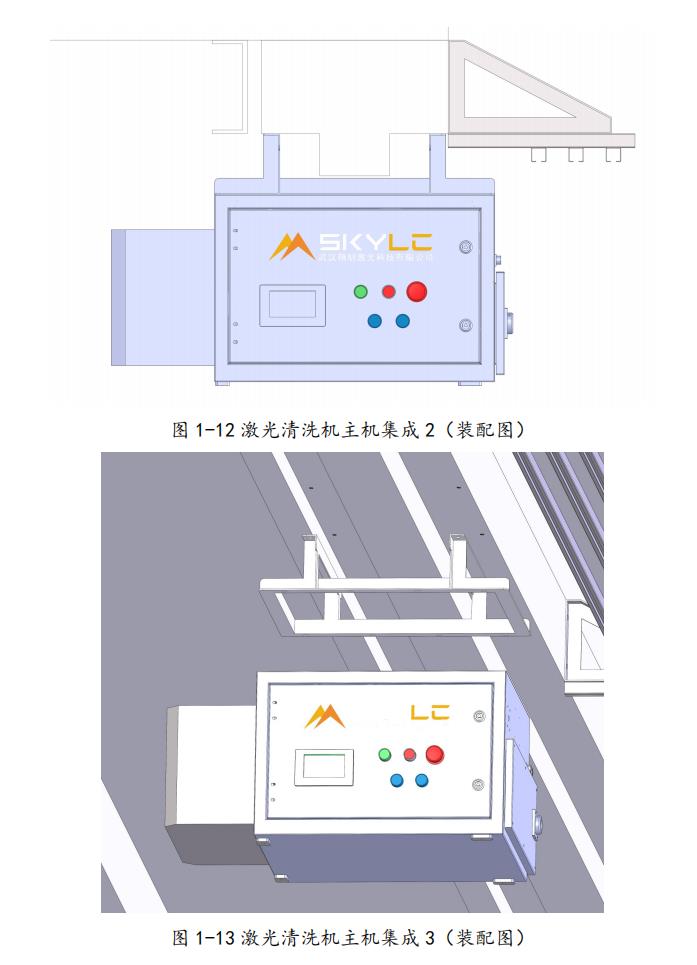
4. 激光清洗机主机集成安装
现场能够安装固定激光清洗机主机的位置有限,结合焊接手臂移动范围以及光纤长度问题影响,多方面考虑计算后,需选择 8 米长光纤。并选择在龙门灯带处的横梁安装设备,安装时需在横梁上加工 8 个 M8 螺纹孔,并通过支架将清洗
机主机与横梁固定。
激光清洗机主机约 80kg,为降低安装难度,安装时可采用简易举升机升高并安装。
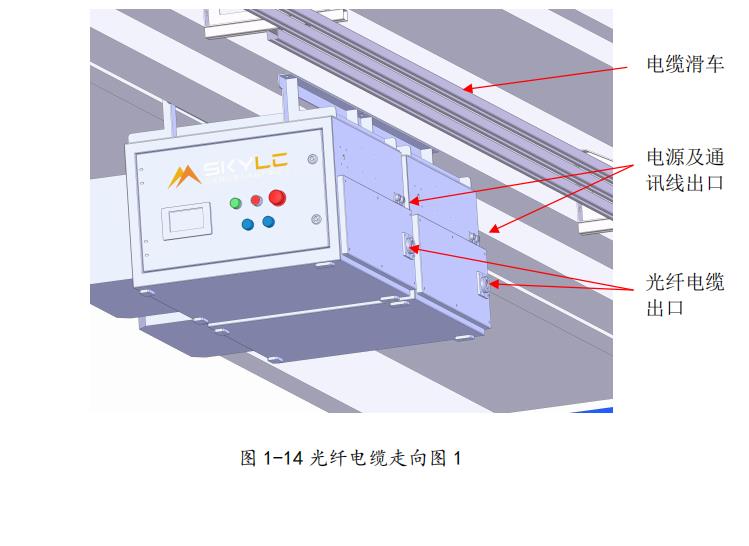
5. 光纤及电缆走向说明
激光清洗头光纤电缆由主机箱体侧部引出,经电缆滑车悬挂,并与焊枪机械臂基座处,再延伸至焊枪头部清洗头处。激光清洗主机电源线则在中部位置延伸至龙门上部平台电源箱处(需预留电源线约 10 米);联动出光通讯线在中部位置延伸至龙门上部平台机器人控制箱处(需预留通讯线 5 米),控制手柄线缆经过线缆滑杆到达焊接设备示教器处(需预留控制线 10 米),采用一个手柄控制两台清洗设备出光和急停。
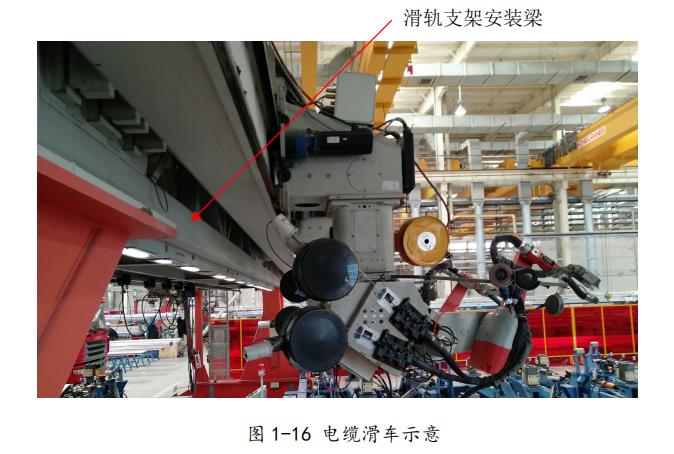
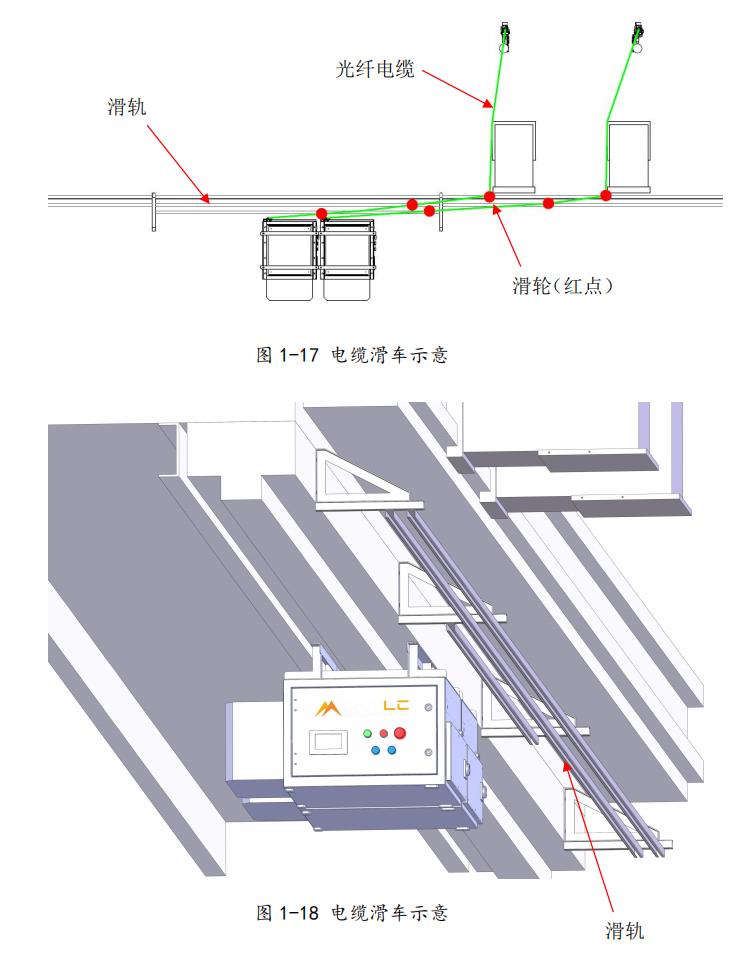
6. 电缆滑车安装
为满足光纤电缆最大限度被利用,特增加电缆滑车机构,采用三组电缆滑车机构将光纤电缆固定在滑轮上,在焊枪手臂基座横向移动时带动光纤电缆左右移动。
电缆滑车安装在 4 组支架上,安装时需在横梁上加工 8 个 M6 螺纹孔,并通过支架将电缆滑车滑轨与横梁固定。
7. 焊前清洗步骤
焊前清洗是与焊缝焊接同步进行,清洗时启动原焊接设备焊接系统、启动激光清洗设备,由于焊前清洗时激光清洗线始终在焊枪激光跟踪线前一定距离,所以存在每次焊接前一小段需要通过遥控手柄控制出光进行手工清洗,该段清洗完成后便可通过启动焊接程序,并同时自动启动激光清洗,实现自动化同步清洗焊接,直到该条焊缝清洗完毕。